Membuat Rangkaian Listrik untuk Menjalankan Motor Induksi 3 phasa
Untuk menjalankan Motor Induksi diperlukan rangkaian listrik sebagai pengontrol dengan tujuan agar :
- Keamanan Operator terjaga,
- Keamanan Motor terjaga,
- Memudahkan start-Stop,
- Memudahkan bolak-balik putaran.
Ada dua macam cara dasar untuk membuat rangkaian listrik dalam menjalankan motor induksi :
- Direct On Line (DOL), menyambungkan motor dengan saluran supley secara langsung, cara ini hanya cocok untuk motor dengan daya rendah,
- STAR-DELTA (Υ-Δ), menyambungkan motor dengan cara motor dirangkai dengan rangkai STAR terlebih dahulu baru kemudian dirubah menjadi rangkaian DELTA. Cara ini lebih cocok untuk motor dengan daya tinggi.
Selanjutnya lebih dalam kita bahas bagaiman cara merangkai kedua macam rangkaian tersebut.
RANGKAIAN DIRECT ON LINE (DOL), rangkaian ini banyak digunakan pada motor induksi dengan daya rendah, karena pada saat start ON bisa terjadi lonjakan arus yang cukup tinggi, bisa sampai puluhan kali arus kerja normal meskipun hanya sesaat. Rangkaian DOL ini dalam penggunaan yang memenuhi standar keamanan, berikut diagram listrik yang menunjukan susunan rangkaian DOL.

Komponen utama dalam rangkaian tersebut :
- Autobreaker (F)
- Kontaktor (K)
- Thermis (Th)
- Phus Butom (PB)
- Kabel (Kb)
- Terminal (T)
CARA KERJA RANGKAIAN DOL,
- Hidupkan Autobreaker (F) untuk memberikan supley keapa selurah rangkaian kontrol DOL,
- Dengan menekan tombol PB Run membuat coil Kontaktor (K) mendapatkan supley sehingga Kontaktor (K)menjadi ON dan memberikan supley listrik pada Motor.
- Dengan adanya kontak point K maka supley pada motor bisa terus dipertahankan meskipun PB Run tidak ditekan lagi.
- Untuk mematikan tekan tombol PB Stop, sehingga aliran listrik pada Coil Kontaktor akan terputus dan membuat Kontaktor tidak aktif sehingga aliran listrik dari jaringan ke Motor terputus dan motor berhenti dan untuk menjalankan lagi tinggal ditekan lagi PB Run.
- Jika terjadi ‘OverCurrent’, Thermis (Th) akan aktif, maka kontak point NormalyClose (NC) Th akan aktif sehingga proses seperti pada saat PB Stop ditekan akan terjadi tetapi untuk menjalankan lagi Thermis (Th)harus di-reset terlebih dahulu dan kemudian PB Run ditekan.
Cara menentukan Nilai komponen yang digunakan disesuaikan dengan daya motor yang dipasang. Dengan menggunakan persamaan berikut ini untuk menentukan nilai komponen pada Rangkaian DOL,
P = I x V x √3 ⇔ I = P / (V x √3) – – – (Persamaan-1)
P = Daya Motor dalam KW (kilo watt)
I = Arus listrik dalam Amper (A)
V = Tegangan Motor dalam Volt (V)
Untuk membuat rangkaian aman, maka kita gunakan Persamaan-1 untuk menentukan besar arus yang akan mengalir pada rangkaian tersebut. Selanjutnya semua komponen yang terpasang ditentukan oleh besarnya arus dengan mengikuti kaidah-kaidah berikut ini :
Thermis ⇒ Th = I → nilai thermis sama dengan Arus sesuai hasil persamaan-1
Autobreaker (F)⇒ Th < F ≤ (1,5 x Th) → nilai Autobreaker tidak boleh dibawah Thermis dan diatas 1,5 Thermis
Kontaktor (K) ⇒ K > F → nilai kemampuan kontaktor harus diatas Autobreaker
Kabel (Kb) ⇒ Kb > K → Ukuran kabel yang digunakan harus mempunyai kemampuan menghantar arus lebih besar dari Kontaktor
Terminal (T) ⇒ T ≥ Kb → Ukuran kabel yang digunakan harus mempunyai kemampuan menghantar arus lebih besar dari Kontaktor
Contoh kasus, suatu motor induksi Daya 3 Kw dan Tegangan kerja motor 380V akan dikontrol oleh rangkaian DOL tentukan nilai komponen yang harus dipasang supaya rangkaian tersebut aman. selanjutnya kita gunakan Persamaan-1.
I = P / (V x √3) ⇔ I = 3000 / (380 x √3) ⇔ I = 4,5 A (amper)
Maka dapat ditentukan
Thermis = 4,5A; Autobreaker = 6A; Kontaktor = 10A; Kabel = 12A; Terminal = 12A;
cara lain untuk menentukan Arus (I) kerja sistem, bisa menggunakan data yang tertulis pada name plate motor tersebut.
RANGKAIAN STAR-DELTA (Y-Δ), rangkaian ini banyak digunakan untuk menjalankan motor dengan daya besar, pada dasarnya rangkaian Y-Δ ini bertujuan untuk mereduksi arus sesaat yang sangat besar pada saat start ON, dengan cara membagi dua tahap yaitu tahapan terangkai Y (STAR) dan selanjutnya tahapan terangkaiΔ (DELTA). Pada saat terangkai Y impedansi motor menjadi tinggi sehingga pada saat di beri tegangan start ON tidak menimbulkan lonjakan arus sesaat yang tinggi, setelah motor berputar kemudian dalam jangka waktu tertentu dirubah menjadi terangkai Δ yang ipedansinya lebih rendah dan sesuai dengan tegangan kerja motor tersebut. Sebelum menerapkan rangkaian Y-Δ yang perlu diperhatikan yakin bahwa motor tersbut pada saat terangkai Δ adalah merupakan tegangan kerja yang sesuai dengan tegangan supley, data tersebut bisa terlihat pada name plate motor. Berikut ini diagram listrik untuk rangkaian Y-Δ
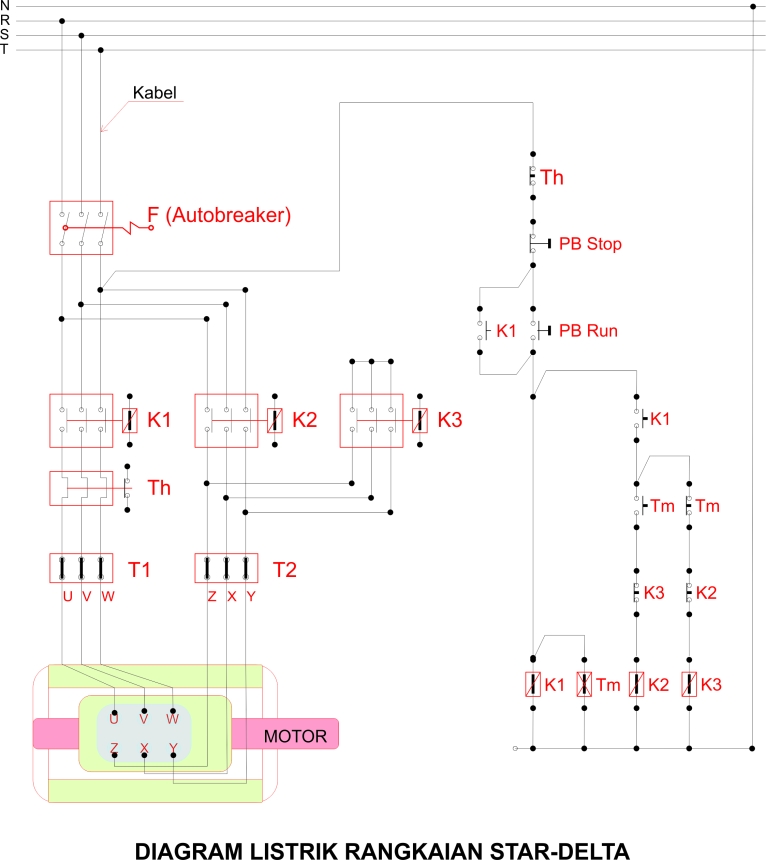
CARA KERJA RANGKAIAN Star-Delta (Y-Δ)
- Hidupkan Autobreaker (F), sehingga aliran listrik dari jaringan sudah siap masuk ke rangkaian (Y-Δ)
- Tekan tombol NO (NormalyClose) PB Run maka arus listrik akan membuat K1 dan Timer (Tm) aktif ON , aktifnya K1 membuat K3 menjadi aktif melalui kontak point NO K1 dan pada saat PB Run dilepas sistem terus ON karena adanya kontak point K1 yang mengunci. Dalam waktu yang bersamaan aktifnya K1 akan memberikan supley pada motor dan K3 membuat konfigurasi sambungan Y (STAR).
- Dalam waktu yang bersamaan Timer (Tm) terus aktif sampai waktu yang ditentukan tercapai. Biasanya untuk keperluan rangkaian Y-Δ timer diSET pada (5 – 10) detik.
- Pada saat timer waktu sudah tercapai, maka kontak pointnya menjadi aktif dan akan mematikan K3 dan sekaligus menghidupkan K2. Sehingga konfigurasi sambungan motor menjadi Delta (Δ), selanjutnya motor terus berjalan dengan konfigurasi Δ
- Untuk mematikan sistem, dengan menekan tombol PB STOP maka akan memutuskan aliran listrik pada seluruh Kontaktor dan Timer.
- Demikian juga jika terjadi OverCurrent maka Thermis (Th) menjadi aktif dan kontak point NC akan berubah menjadi terbuka sehingga aliran supley ke K1, K2, K3 dat Tm terputus dan sistem berhenti. Untuk menjalankan lagi Thermis harus direset lebih dahulu.
Komponen utama penyusun rangkaian ini tidak berbeda dengan rangkaian DOL hanya jumlah komponen yang berbeda dan untuk rangkaian Y-Δ otomatis diperlukan tambahan timer. Penentuan nilai komponen menggunakan Persamaan-1 dan kaidah-kaidah berikut ini :
Thermis ⇒ Th = ½ I → nilai thermis sama dengan dari setengah Arus kerja sesuai hasil persamaan-1
Autobreaker (F)⇒ I < F ≤ (1,5 x I) → nilai Autobreaker tidak boleh dibawah ArusKerja (I) dan diatas 1,5 ArusKerja (I)
Kontaktor (K) ⇒ K> F → nilai kemampuan kontaktor K1, K2 dan K3 harus mempunyai kemampuan menghantar arus lebih tinggi dar Autobreaker
Kabel (Kb) ⇒ Kb > K → Ukuran kabel yang digunakan harus mempunyai kemampuan menghantar arus lebih besar dari Kontaktor
Terminal (T) ⇒ T ≥ Kb → Ukuran kabel yang digunakan harus mempunyai kemampuan menghantar arus lebih besar dari Kontaktor
Contoh untuk membuat rangkaian (Y-Δ) pada motor 30 KW dengan tegangan kerja konfigurasi Δ, maka dapat ditentukan nilai komponen yang diperlukan sebagai berikut :
I = P / (V x √3) ⇔ I = 30000 / (380 x √3) ⇔ I = 45 A (amper)
Maka dapat ditentukan
Thermis = (45/2) A = 22,5 A; Autobreaker = 70A; Kontaktor = 80A; Kabel = 100A; Terminal = 120A;
cara lain untuk menentukan Arus (I) kerja sistem, bisa menggunakan data yang tertulis pada name plate motor tersebut.
Semoga pembahasan sederhana ini ada manfaatnya untuk kemajuan kita semua.
sumber : https://gtp45.wordpress.com/2015/04/25/membuat-rangkaian-listrik-untuk-menjalankan-motor-induksi-3-phasa/
Tidak ada komentar:
Posting Komentar